Wind tunnel test data
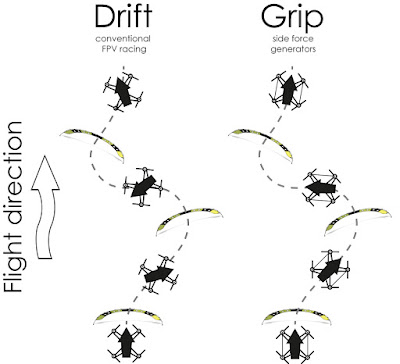
This morning, I did some wind tunnel tests with the GEMiNi chassis. The GEMiNi was designed for FPV air races at high flight velocities, therefore the aerodynamic properties are important (well, it was also designed to look good of course...). I measured the aerodynamic forces generated by the frame (excluding the influence of the propeller's downwash) at a flight velocity of 12 m/s (= 43 km/h, maybe half the top speed) in a wind tunnel using a 2-axes force balance.

Angles of attack between 0 (hovering flight) and 90 degrees (vertical climb) were tested. The angle of attack is defined as the angle between the oncoming flow and the propeller disk. Both the lift coefficient (perpendicular to the oncoming flow) and the drag coefficient (parallel to the oncoming flow) were determined for each angle of attack (n = 3). The coefficients are based on the planform area of the copter.
 Four different setups were tested:
Four different setups were tested:
Additionally (and more importantly), the drag of the copter is reduced by 14 % to 40 %. Aerodynamic drag slows the copter down, so any reduction is clearly beneficial.
To conclude: The analyses have shown, that the canopy and the rotor inclination both improve the aerodynamic properties of a hexrotor substantially. Higher top speeds, respectively a larger endurance during cruising flight will be possible. The additional weight of the canopy is negligible and will hardly influence these conclusions.
P.s.: It is constantly raining here in Bremen, and I am going snowboarding tomorrow, so the outdoor flights are a bit delayed...

Angles of attack between 0 (hovering flight) and 90 degrees (vertical climb) were tested. The angle of attack is defined as the angle between the oncoming flow and the propeller disk. Both the lift coefficient (perpendicular to the oncoming flow) and the drag coefficient (parallel to the oncoming flow) were determined for each angle of attack (n = 3). The coefficients are based on the planform area of the copter.

- "canopy-tilt-" refers to the hexrotor without canopy and without the inclination of the rotors. This setup is very much comparable to a conventional, standard hexrotor like e.g. the MM6.
- "canopy+tilt-" includes the canopy, but no rotor inclination.
- "canopy-tilt+" is without canopy, but with rotor inclination.
- "canopy+tilt+" is finally the GEMiNi as I am currently flying it.
 | |
| Lift coefficient vs. angle of attack. Large lift coefficients at angles of attack between 10 and 45° result in lower thrust requirements to keep the copter in the air. The application of a canopy and rotor inclination enhances the performance. |
Additionally (and more importantly), the drag of the copter is reduced by 14 % to 40 %. Aerodynamic drag slows the copter down, so any reduction is clearly beneficial.
 | |
| Drag coefficient vs. angle of attack. The drag of the copter is reduced quite dramatically by using the canopy and rotor inclination. Top-speeds will be much higher compared to the conventional setup. |
To conclude: The analyses have shown, that the canopy and the rotor inclination both improve the aerodynamic properties of a hexrotor substantially. Higher top speeds, respectively a larger endurance during cruising flight will be possible. The additional weight of the canopy is negligible and will hardly influence these conclusions.
P.s.: It is constantly raining here in Bremen, and I am going snowboarding tomorrow, so the outdoor flights are a bit delayed...


Excellent roundup with some really great information here
ReplyDelete